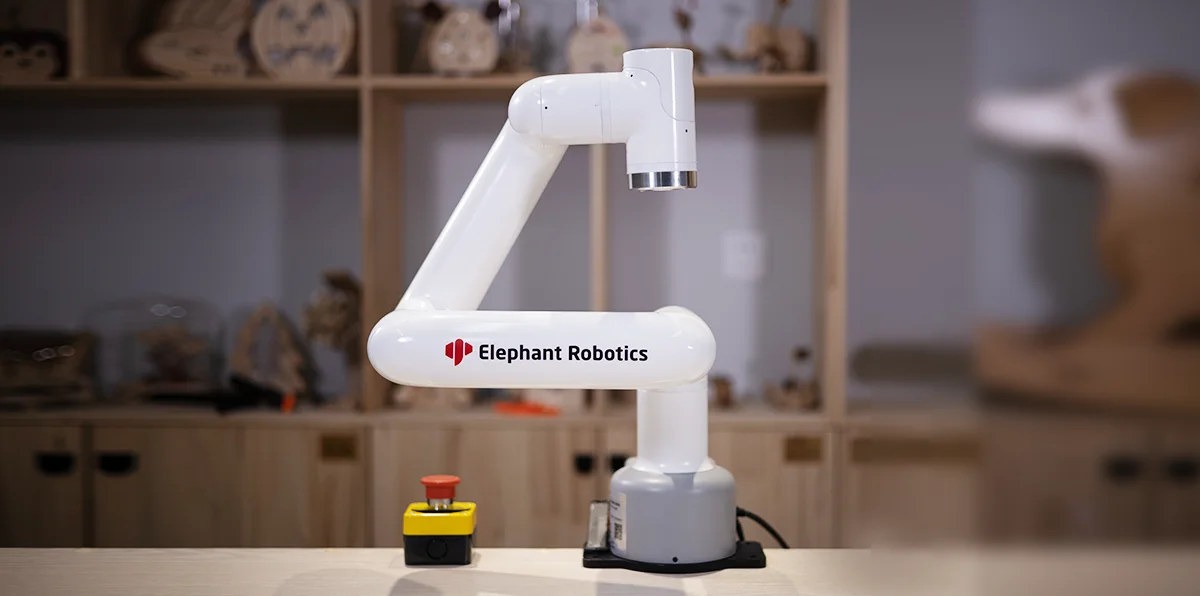
Elephant Robotics выпустила свой самый совершенный на сегодняшний день робот-манипулятор с 6 степенями свободы — myCobot Pro 600, оснащенный Raspberry Pi 4 SBC, обеспечивающий максимальный рабочий диапазон 600 мм и поддержку полезной нагрузки до 2 кг.
Читать далее «Роботизированный манипулятор myCobot Pro 600 на базе Raspberry Pi 4 поддерживает рабочий диапазон 600 мм и полезную нагрузку до 2 кг.»Роботизированный манипулятор myCobot Pro 600 на базе Raspberry Pi 4 поддерживает рабочий диапазон 600 мм и полезную нагрузку до 2 кг.